
Teileliste
| 1x Arduino NANO | |
| 1x SG90 Servo | |
| 1x Kippschalter | |
| 1x Powerbutten | |
| 1x Blockbaterie Adapter | |
| x Kabel |
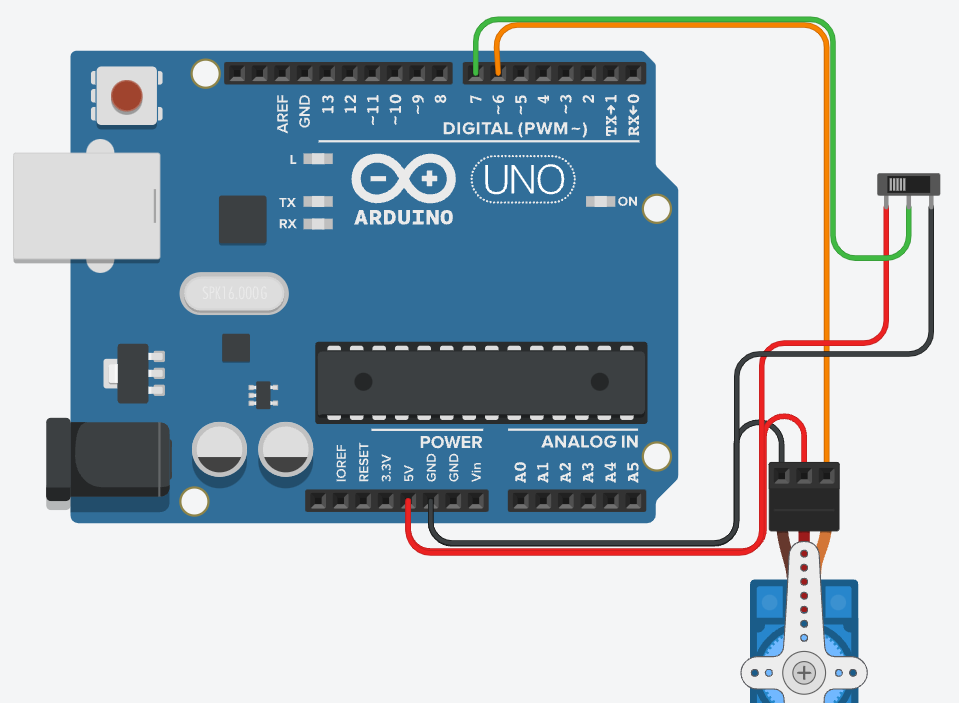
Schaltplan
Code
#include <Servo.h> // Die Servobibliothek wird aufgerufen. Sie wird benötigt, damit die Ansteuerung des Servos vereinfacht wird.
Servo servoblau; // Erstellt für das Programm ein Servo mit dem Namen „servoblau“
int taster1=7; // Das Wort „taster1“ steht jetzt für den Wert 7.
int tasterstatus1=0; // Das Wort „tasterstatus1“ steht jetzt zunächst für den Wert 0. Später wird unter dieser Variable gespeichert, ob der Taster1 gedrückt ist oder nicht.
void setup() // Einmaliger Befehl
{ // Befehlszeile wird geöffnet
servoblau.attach(6); // servoblau ist an (Pin6) angeschlossen
pinMode(taster1, INPUT); // Der Pin mit dem Taster1 (Pin7) ist jetzt der Eingang.
} // Befehlszeile wird geschlossen
void loop() // loop = wiederholung fortlaufend
{ // loop wird geöfnet
tasterstatus1=digitalRead(taster1); // Hier wird der Pin7 ausgelesen (Befehl: digitalRead). Das Ergebnis wird unter der Variable "tasterstatus1" mit dem Wert "HIGH" für 5Volt oder "Low" für 0Volt gespeichert.
if (tasterstatus1 == HIGH) // Wenn der Taster1 gedrückt wird (Spannungssignal ist hoch)
{ // if-Schleife wird geöffnet
delay(500); // wartet in ms
servoblau.write(160); // um wie viel sich der servo drehen soll
} // if-Schleife wird geschlossen
else // sonst
{ // else-schleife wird geöffnet
servoblau.write(0); // um wie viel sich der servo drehen soll
} // else-schleife wirf geschlossen
} // loop wird geschlossen